Student Projects
SAVE: A Vision-Based Bicycle Safety System for Alerting Collision with Vehicles
Project Video
Team Members

Team Members:
Zining Wang, Yinchen Ni, Jiache Zhang, Weihan Chi, Jeffrey Ma
Instructors:
An Zou
Project Description
-
Problem

As cycling gains popularity in China, concerns about traffic safety, especially accidents involving cyclists and cars, are on the rise. While radar and camera-based sensors enhance safety for cars, a critical gap exists in applying these measures to bicycles. This project addresses the need for innovative safety solutions by designing a safety system for cyclist equipment, implemented on an embedded system that can be carried and easily installed on bicycles.
-
Design Description
Design Description
We designed a bicycle-mounted embedded system that detects and alerts when cars are approaching. Binocular cameras capture car images and measure distance. The gyroscope activates performance mode upon detecting handlebar turns. The buzzer buzzes when the distance is too close to the car. An external NPU accele-rates program execution.

Hardware Components:
Raspberry Pi 4B+
Intel Neural Computing Stick 2 (NCS2)
Passive Buzzer
2x 100° Binocular Camera:
Achieves 360-degree coverage by combining with human eyesight
MPU6050 Gyroscope:
Collects handlebar acceleration magnitude using I2C protocol
Software Dependencies:
C++ 17 on Linux
Intel OpenVINO ™Toolkit [2]
Utilizes Vehicle Detection Model
OpenCV Library
Calibrates cameras and provides Stereo SGBM algorithm for distance measurement
Caddy Server 2
Monitors output through network
Assembling set-up:

Optimization
We adapt scheduling optimization and power saving strategy to make our system more effective.
scheduling optimization
power saving strategy
Performance Mode: Take turns reading camera images
Efficiency Mode: Processor sleeps for the average frame processing time before next shot
Other optimizations
By profiling the IO and running time of each components, we optimize the system parallelism to minimize frame processing time.
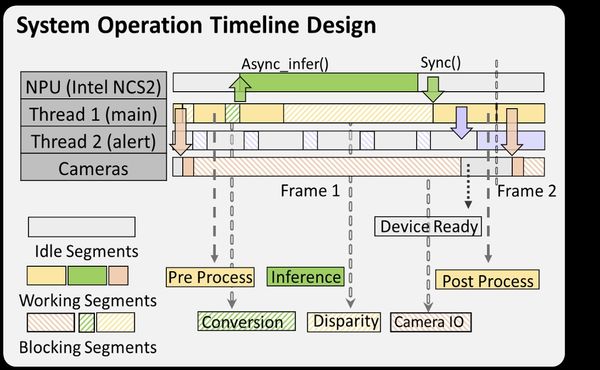
We design 2 modes to save power.
Upgrade to the performance mode when handlebar is turning or there are close cars. Otherwise degrade to the efficiency mode.
Parameter adjustment to balance accuracy and speed
Static code optimization to reduce latency and power consumption
Adaptive refresh rate to focus more on dangerous areas
-
Validation
We measure the FPS and power consumption in both operation mode. The results are shown in the following table and figure.
Comparison between Performace & Efficiency Mode Performance Efficiency FPS 10 5 Power(W) 12.48 9.16 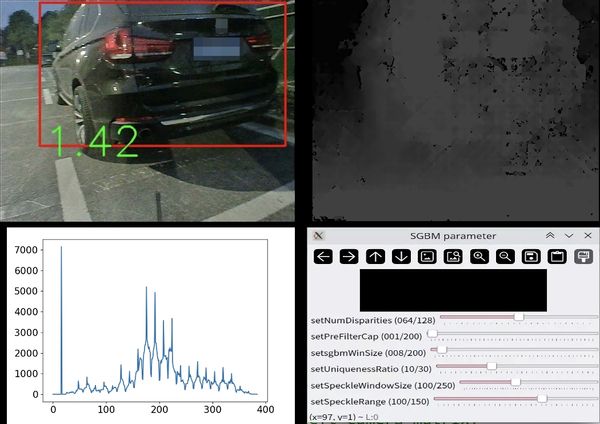
-
Conclusion
The project we design could successfully recognize cars and keep safe distance by alerting the cyclists through buzzing. We also utilize several performance optimization and power saving techniques to increase the speed of program execution and extend the battery life.
-
Acknowledgement
We appreciate and feel grateful for all the support from JI, our professor, teaching assistant and our teammates.
-
Reference
[1]https://ieeexplore.ieee.org/abstract/document/8330069
[2]https://docs.openvino.ai/2023.1/omz_models_model_vehicle_detection_0200.html
[3]https://docs.opencv.org/3.4/d2/d85/classcv_1_1StereoSGBM.html